· Team Odyssey · 3 min read
What Is IRC?
The International Rover Challenge (IRC) is a premier annual space robotics engineering competition that invites university students from around the world to design, build, and operate next-generation planetary rovers capable of performing missions in simulated Martian conditions. It is organized by the Space Robotics Society (SPROS) and has grown into one of Asia’s most unique and dynamic platforms for space-focused innovation and experiential learning.
Objective & Mission
The primary objective of IRC is to challenge and inspire the next generation of space engineers by giving them real-world, mission-oriented experience in robotics and space technology. Through hands-on challenges, students learn to tackle complex engineering problems, integrate interdisciplinary skills, and develop both technical competencies and essential soft skills such as project planning, teamwork, and business strategy.
Impact & Experience
IRC provides a real-world interdisciplinary engineering platform where students experience the full lifecycle of advanced robotics design — from ideation and prototyping to testing and mission execution. The challenge pushes teams to think like space exploration professionals and collaborate across engineering disciplines to solve practical problems.
Astrobiology Expedition (ABEx)
The Astrobiology Expedition (ABEx) challenges the rover to function as a mobile science laboratory, tasked with exploring designated sites to identify and characterise environments capable of supporting microbial life. The rover conducts in-situ scientific analysis using onboard instruments, passive sensors, and mechanical sampling systems to search for signs of past or present life. Equipped with at least one life-detection instrument selected by the team, the rover must collect, analyse, and securely cache an uncontaminated sample in a sealed container. This cached sample is then deployed at a specified location for future retrieval, emphasizing precision, contamination control, and mission-ready design under realistic planetary exploration constraints. 🌌🔬
Reconnaissance and Autonomous Delivery Operation (RADO)
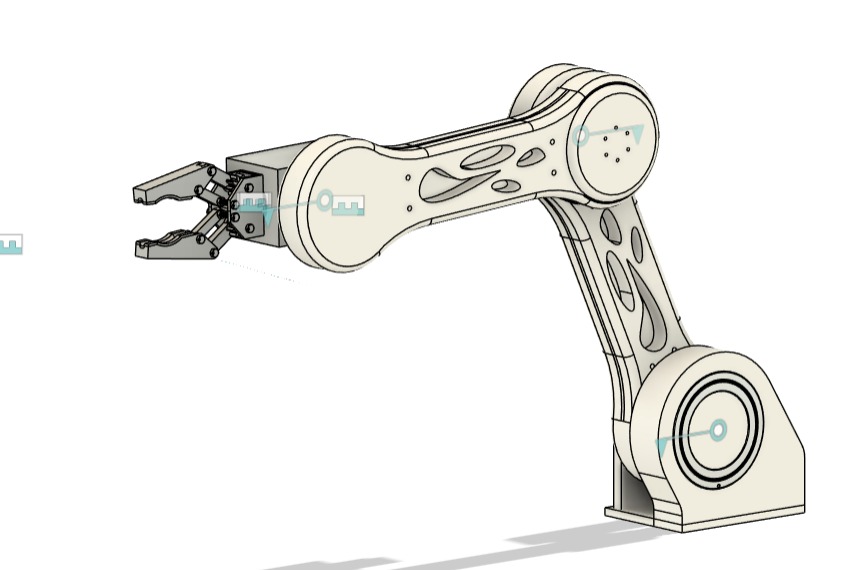
The Reconnaissance and Autonomous Delivery Operation (RADO) mission tests a rover’s ability to perform intelligent field operations by navigating up to 500 meters from the base station to conduct reconnaissance, locate scattered objects, and execute precise pick-and-place tasks. The rover must identify targets, retrieve them using an onboard robotic arm, and either deliver them to designated GPS coordinates or securely store them for final delivery back to the base station. This mission emphasizes autonomy, navigation accuracy, manipulation capability, and efficient storage design—key competencies for real-world planetary logistics and exploration missions.
Instrument Deployment and Maintenance Operation (IDMO)
The Instrument Deployment and Maintenance Operation (IDMO) mission evaluates a rover’s capability to perform precision-driven tasks critical to planetary exploration. Divided into Instrument Deployment and Instrument Maintenance stages, the rover must traverse a short distance to interact with a mock instrument panel and execute multiple, fine-controlled operations using robotic manipulators. This mission emphasizes accuracy, dexterity, adaptability, and robust mechanical design, requiring teams to handle flexible task requirements while demonstrating reliable remote maintenance and deployment skills essential for long-duration space missions.
Project Implementation and Management Assessment (PIMA)
The Project Implementation and Management Assessment (PIMA) focuses on evaluating a team’s complete rover development journey through an in-depth, one-to-one interaction with the judges. Teams present their rover design, highlighting key lessons learned across the entire project lifecycle—from system engineering, project planning, manufacturing, and testing to final integration. This assessment emphasizes technical decision-making, management strategy, problem-solving, and innovation, while also providing a platform to showcase project spin-offs and address detailed questions from the judging panel.