· Team Odyssey
The Blog
Team Odyssey's official blog, where we post things we learn from the development of Anveshak.
 · Ruthvik
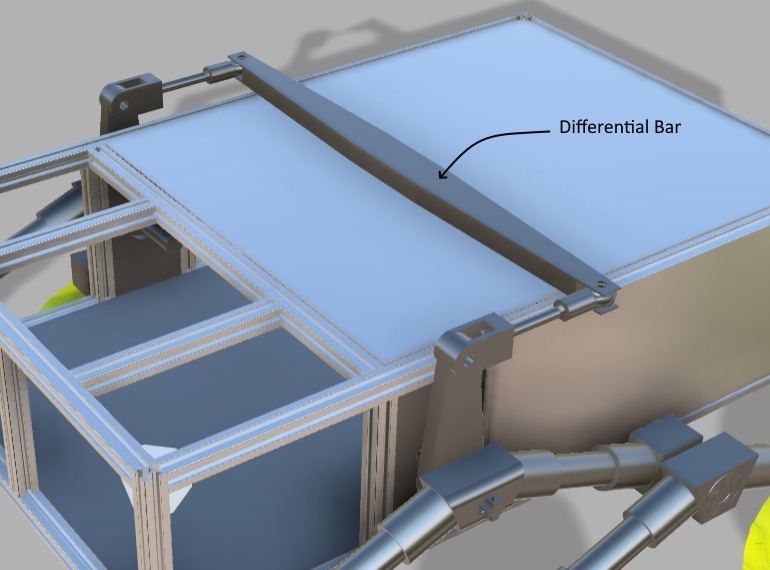
· RuthvikThe Differential Bar Mechanism
When designing a rover that must traverse rocks, sand, and uneven terrain, stability becomes a top priority. The differential bar mechanism is one of those important mechanism that makes this possible. It’s simple, mechanical, and absolutely vital.
 · The Arm Team
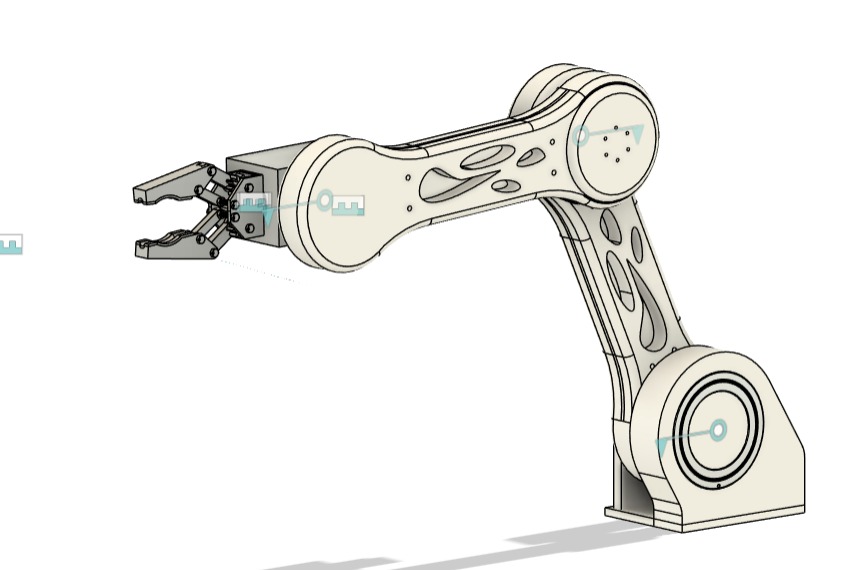
· The Arm TeamOur 6-DOF Rover Arm - Strength Meets Precision
Our new 6 Degrees of Freedom (6-DOF) robotic arm is designed for high performance and reliability. Built using a sandwich structure of 3D-printed parts and metal reinforcements, it combines low weight with excellent strength and rigidity.
 · Dinesh, Lohitashwa
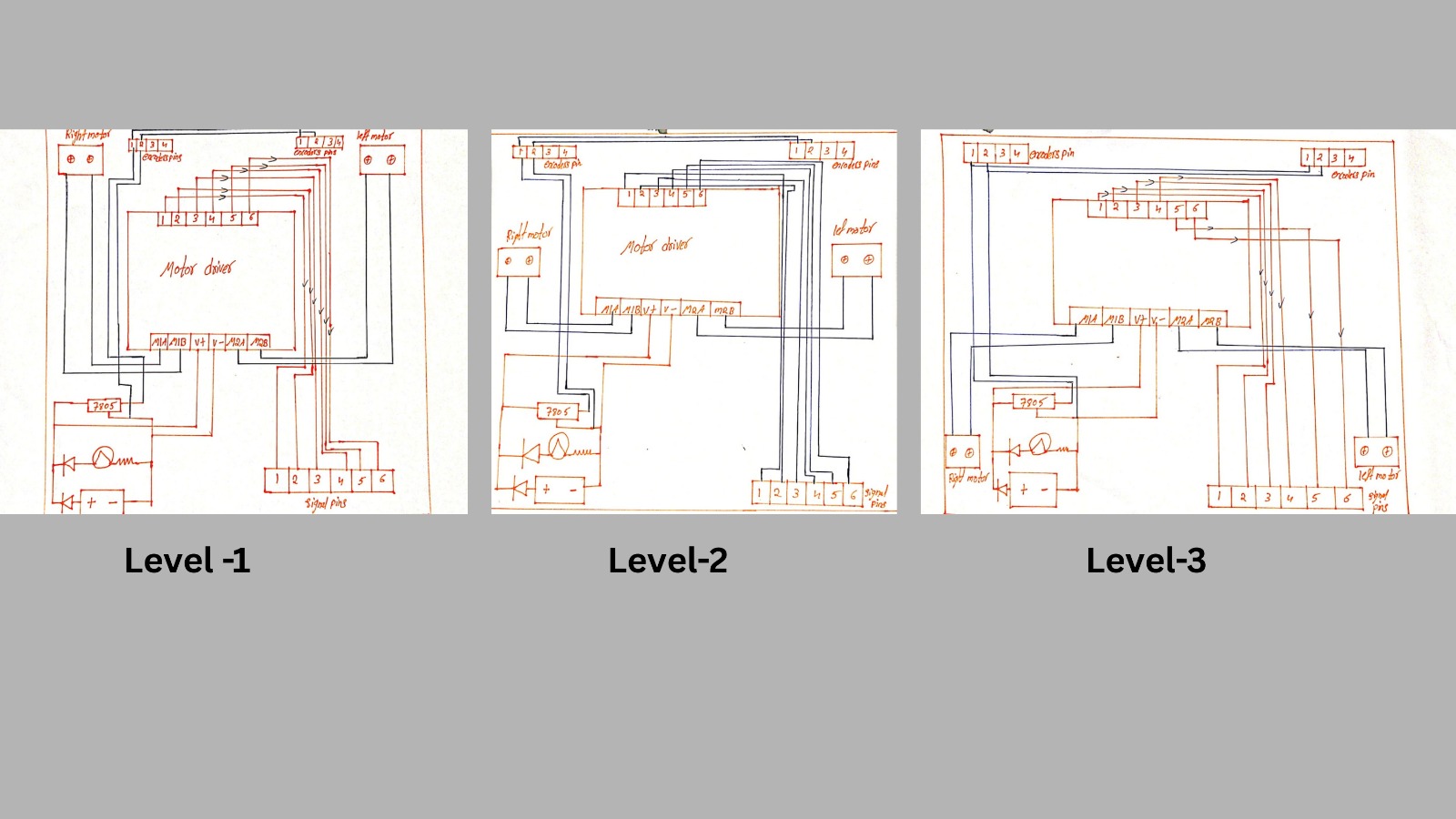
· Dinesh, LohitashwaThree-Level PCB Design for Advanced Wheel Control System
This advanced robotic system features a sophisticated two-tier power management architecture designed to efficiently distribute power from a 24V battery source to multiple subsystems. The design incorporates strategic buck converter placement to ensure optimal voltage regulation and independent control of various robotic components.
 · Dinesh, Lohitashwa
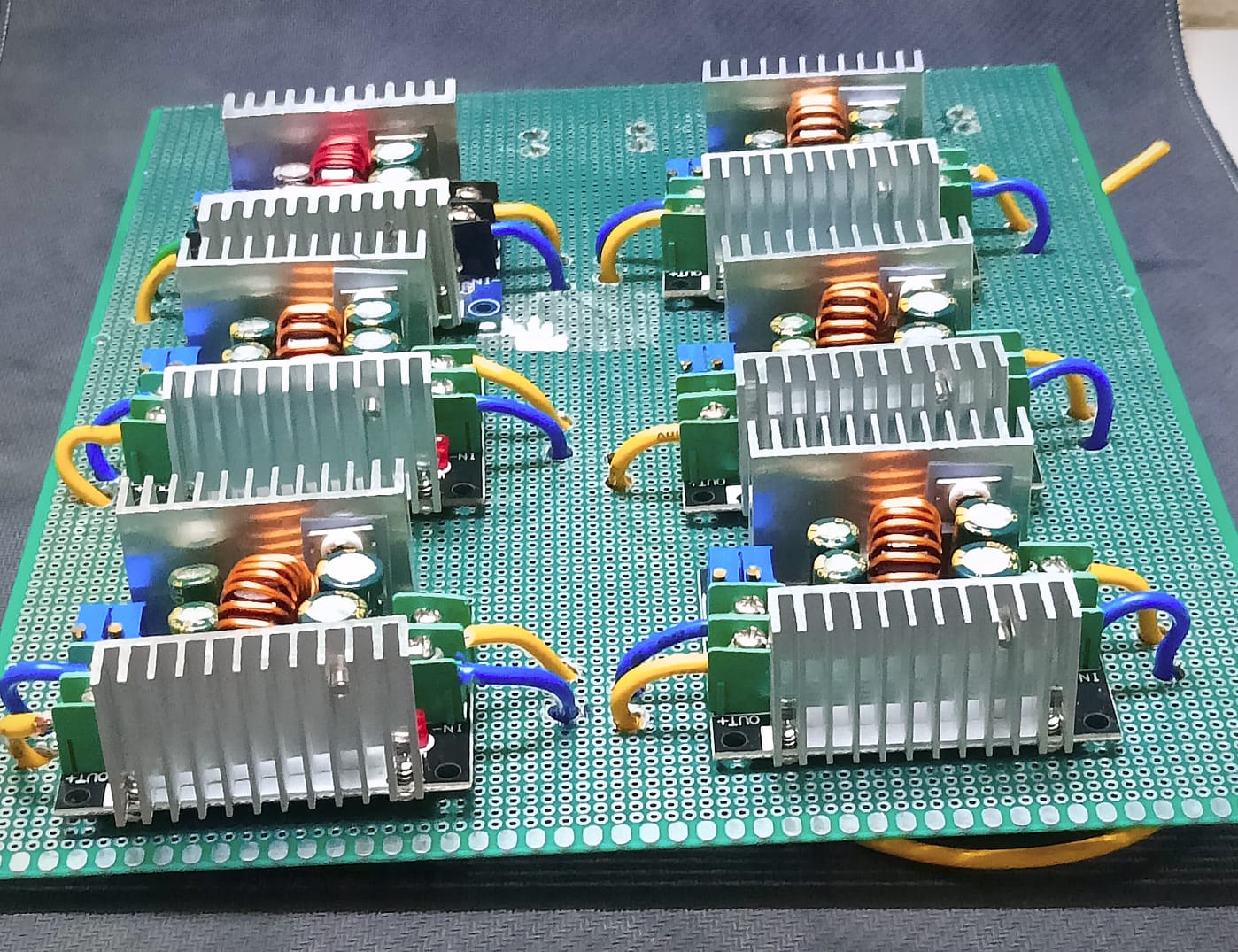
· Dinesh, LohitashwaHow We Plan To Do Power Distribution
This advanced robotic system features a sophisticated two-tier power management architecture designed to efficiently distribute power from a 24V battery source to multiple subsystems. The design incorporates strategic buck converter placement to ensure optimal voltage regulation and independent control of various robotic components.
 · Greeshma, Lohith, Tarun, Harshil
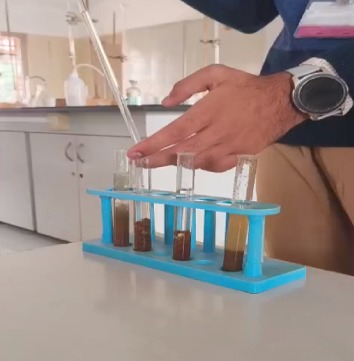
· Greeshma, Lohith, Tarun, HarshilThe Biuret Test - Mapping Protein Content in Rocky, Moss, Red, and Clay Soils
A step-by-step breakdown of our process for analyzing soil.