· Greeshma, Lohith, Tarun, Harshil · 2 min read
The Biuret Test - Mapping Protein Content in Rocky, Moss, Red, and Clay Soils
A step-by-step breakdown of our process for analyzing soil.
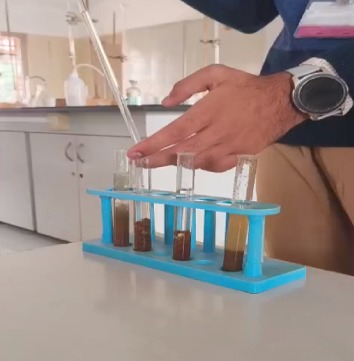
A little while back, we ran the Biuret test on four different types of soil—rocky soil, moss soil, red soil, and clay soil. The idea was simple: check for the presence of proteins, which often hint at organic matter and microbial life hidden underground. Each sample had its own personality, and we were curious to see how they’d react.
We followed the same steps for all four: making a soil extract, adding sodium hydroxide to make it alkaline, and then carefully dripping in copper sulfate. The rocky soil didn’t surprise us much—it mostly stayed blue, showing almost no protein activity. The moss soil, on the other hand, came alive with a stronger violet tint, which made sense since mossy environments are rich in decayed plant matter. Red soil showed only a faint color change, hinting at lower organic content. Clay soil gave us a light purple as well, suggesting some protein presence, but not as much as the mossy sample.
Looking back, it was fascinating how a few drops of solution could reveal the hidden chemistry of soils we walk across every day. It reminded us that not all soils are created equal—some are teeming with life, while others are more barren—and a simple color test can make that invisible world visible.